ZLTECH 24V-36V 5A DC электрычны Modbus RS485 бесщеточный кантролер драйвера рухавіка для AGV


















ФУНКЦЫЯ І ВЫКАРЫСТАННЕ
1 Рэжым рэгулявання хуткасці
Рэгуляванне хуткасці вонкавага ўваходу: падключыце 2 фіксаваныя клемы вонкавага патэнцыяметра да порта GND і порта +5v драйвера адпаведна.Падключыце канец рэгулявання да канца SV, каб выкарыстоўваць знешні патэнцыяметр (10K~50K) для рэгулявання хуткасці, або праз іншыя блокі кіравання (напрыклад, ПЛК, адначыпавы мікракампутар і г.д.) увядзіце аналагавае напружанне на канец SV для рэалізацыі рэгулявання хуткасці (адносна GND).Дыяпазон прымальнага напружання порта SV ад пастаяннага току да +5 В, а адпаведная хуткасць рухавіка ад 0 да намінальнай хуткасці.
2 Упраўленне пускам і прыпынкам рухавіка (EN)
Працай і прыпынкам рухавіка можна кіраваць, кіруючы ўключэннем і выключэннем клемы EN адносна GND.Калі клема праводзіць, рухавік будзе працаваць;інакш рухавік спыніцца.Калі для спынення рухавіка выкарыстоўваецца тэрмінал запуску/прыпынку, рухавік спыніцца натуральным чынам, а закон яго руху залежыць ад інэрцыі нагрузкі.
3 кіравання рухавіком наперад/назад (F/R)
Напрамак руху рухавіка можна кантраляваць, кіруючы ўключэннем/выключэннем клемы F/R і клемы GND.Калі F/R і клема GND не праводзяць, рухавік будзе працаваць па гадзіннікавай стрэлцы (з боку вала рухавіка), у адваротным выпадку рухавік будзе працаваць супраць гадзіннікавай стрэлкі.
4 Збой драйвера
Калі ўнутры драйвера ўзнікае перанапружанне або перагрузка па току, драйвер пераходзіць у стан абароны і аўтаматычна спыняе працу, рухавік спыняецца, а сіні індыкатар на драйверы гасне.Драйвер выпусціць сігнал трывогі, калі клема ўключэння будзе скінута (г.зн. EN адключана ад GND) або адключана харчаванне.Калі ўзнікае гэтая няспраўнасць, праверце злучэнне правадоў з рухавіком або нагрузкай рухавіка.
5 Порт сувязі RS485
У рэжыме сувязі драйвера выкарыстоўваецца стандартны пратакол Modbus, які адпавядае нацыянальнаму стандарту GB/T 19582.1-2008.Выкарыстоўваючы 2-правадную паслядоўную сувязь на аснове RS485, фізічны інтэрфейс выкарыстоўвае звычайны 3-кантактны порт (A+, GND, B-), і паслядоўнае злучэнне вельмі зручнае.
Параметры
| Кіроўца | ZLDBL4005S |
| Уваходнае напружанне (В) | 24В-36В пастаяннага току |
| Выхадны ток (А) | 5 |
| Спосаб кантролю | Modbus RS485 |
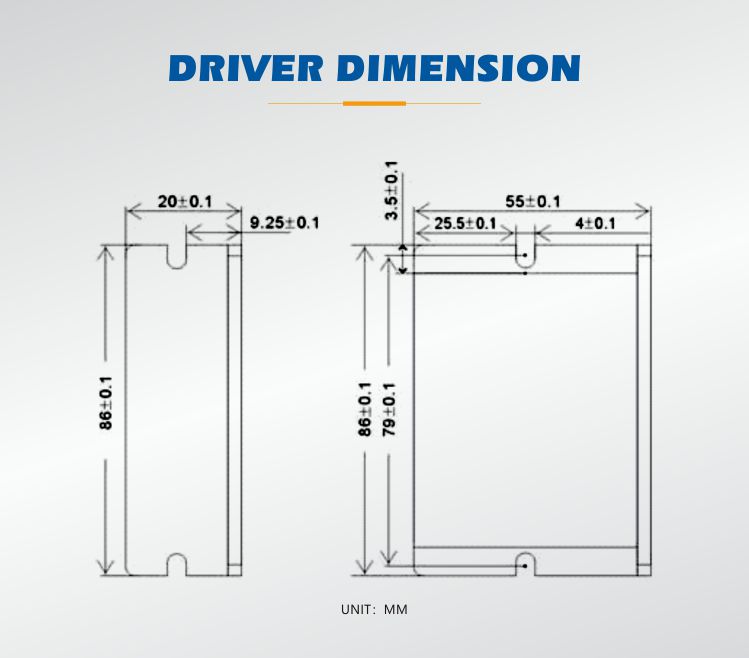
| Памер (мм) | 86*55*20 мм |
| Вага (кг) | 0,1 |
Вымярэнне
Ужыванне

Ўпакоўка

Прылада вытворчасці і кантролю

Кваліфікацыя і сертыфікацыя

Офіс і завод

Супрацоўніцтва

Катэгорыі тавараў
-

2S86 ZLTECH 86 серыі DC 36V 48V AC 27V-75V clo...
-

ZLTECH 24V-48V 30A Canbus Modbus двухканальны D...
-

ZLTECH 15 цаляў 200 кг пастаяннага току бесщеточный хаб-рухавік з...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V інтэграваны крок...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

Убудаваны крокавы рухавік ZLTECH 57 мм Nema23 з д...





